Pedestrian Detection
Group Cost-sensitive Boosting with Multi-scale Decorrelated Filters for Pedestrian Detection
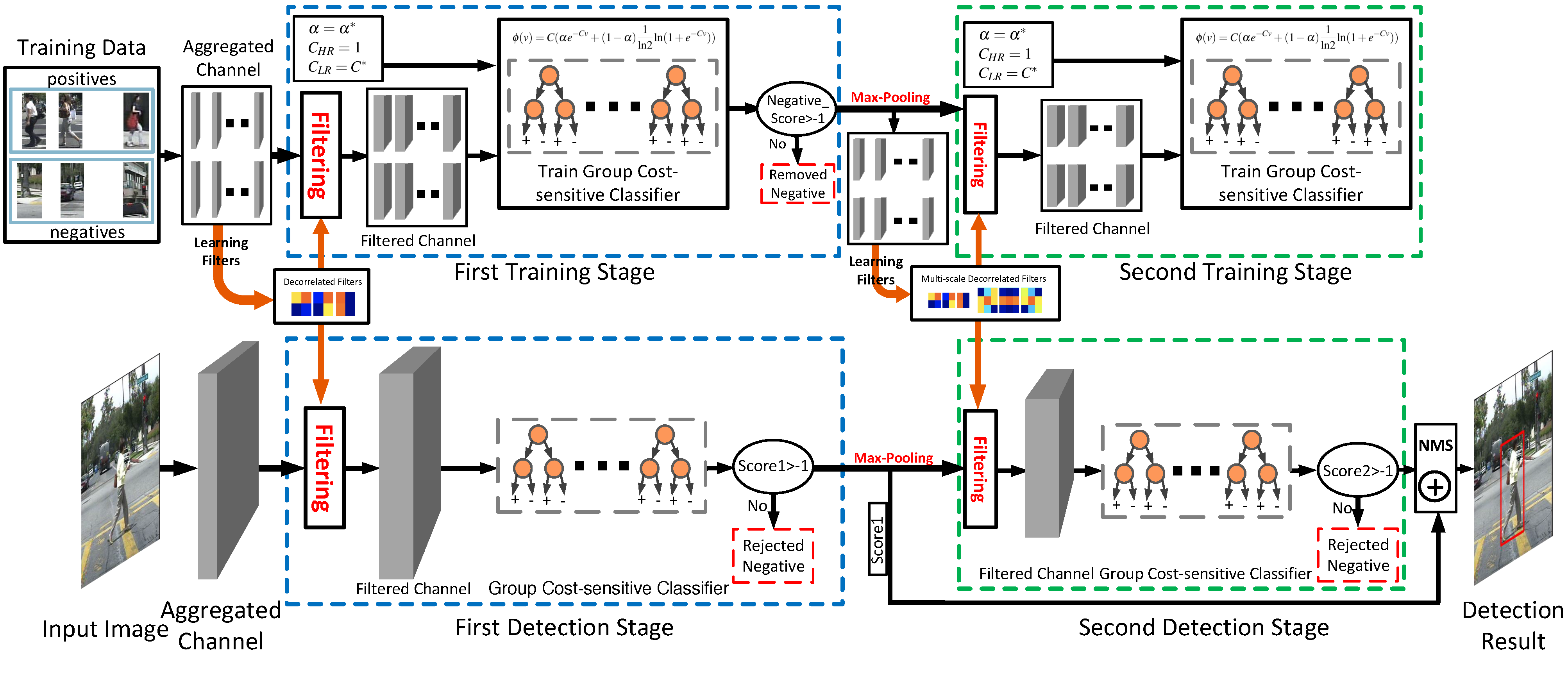
We propose a novel two-stage pedestrian detection framework that combines multiscale decorrelated filters to extract more discriminative features and a novel group costsensitive boosting algorithm. Proposed framework is shown below. The upper and lower parts are the training and testing procedures. For each stage, the decorrelated filters are learned from feature channels and used to extract filtered channel features. Then the classifier is trained by exploiting proposed group costsensitive RealBoost algorithm.
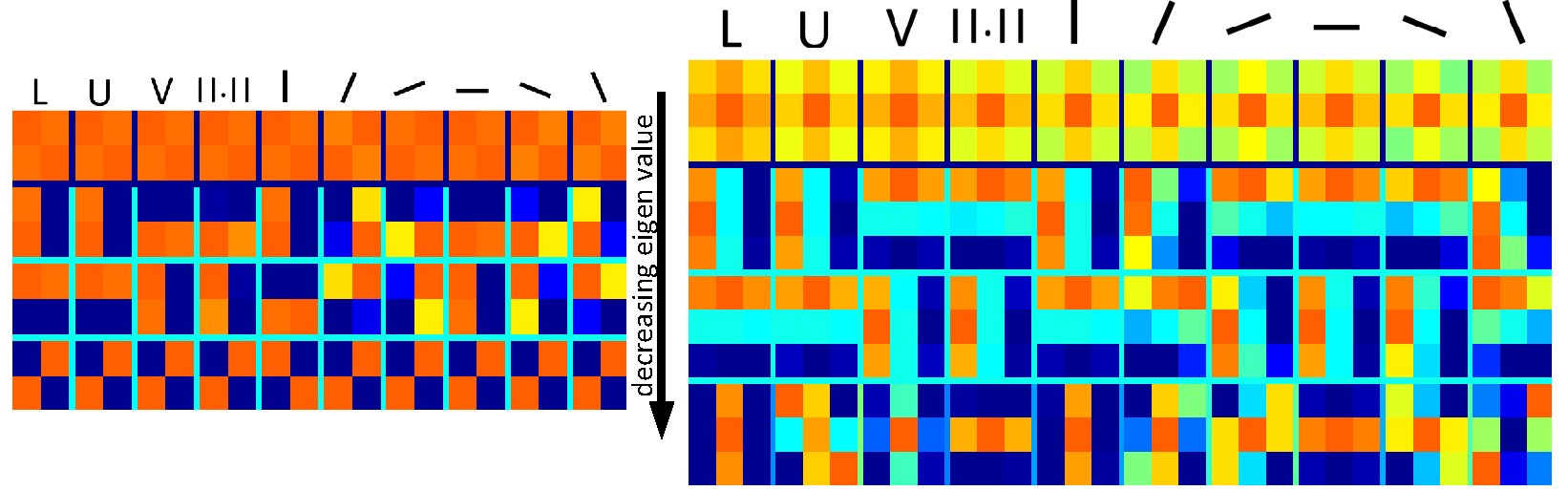
Learned multi-scale decorrelated filters with size of 2x2 (left) and 3x3 (right) from Caltech10x training set.
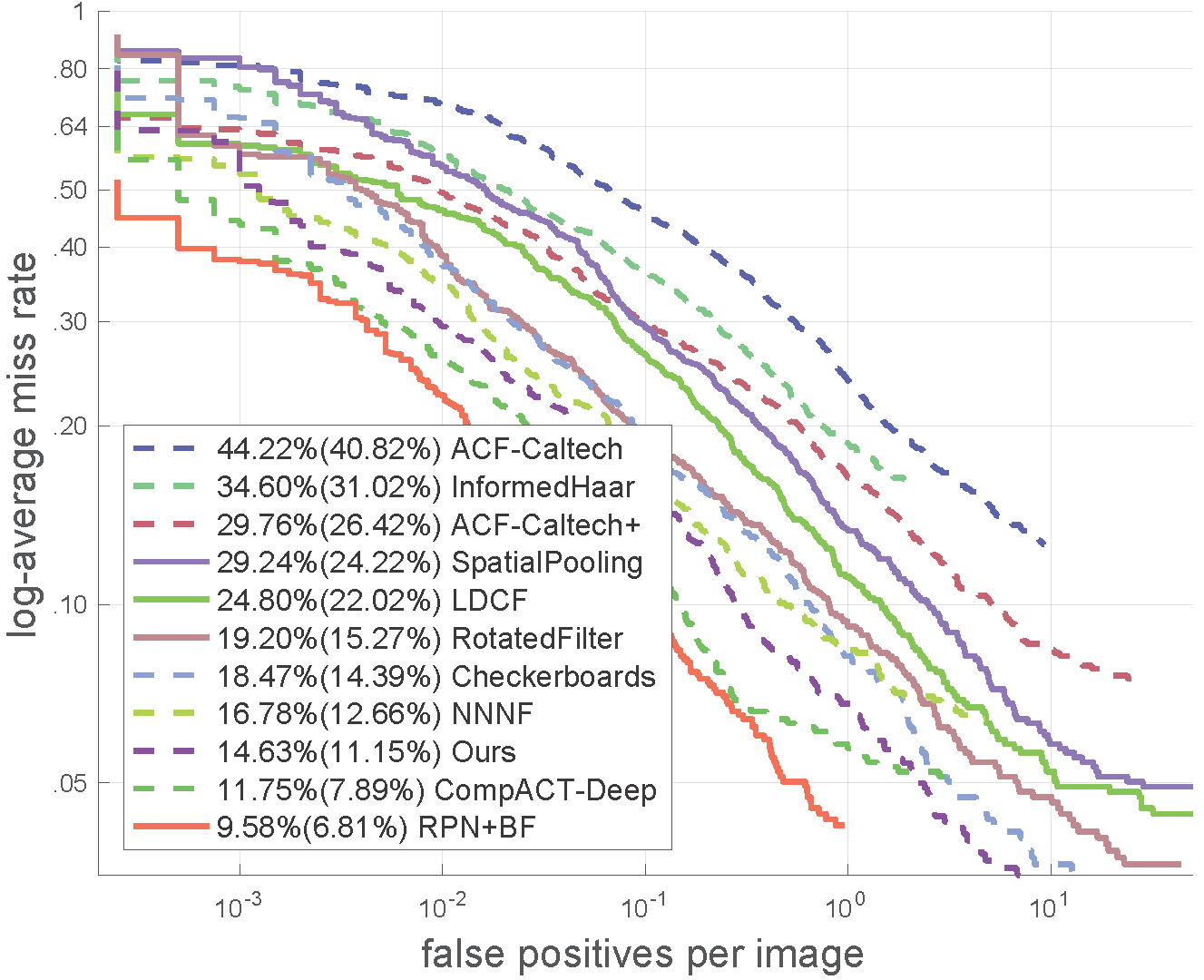
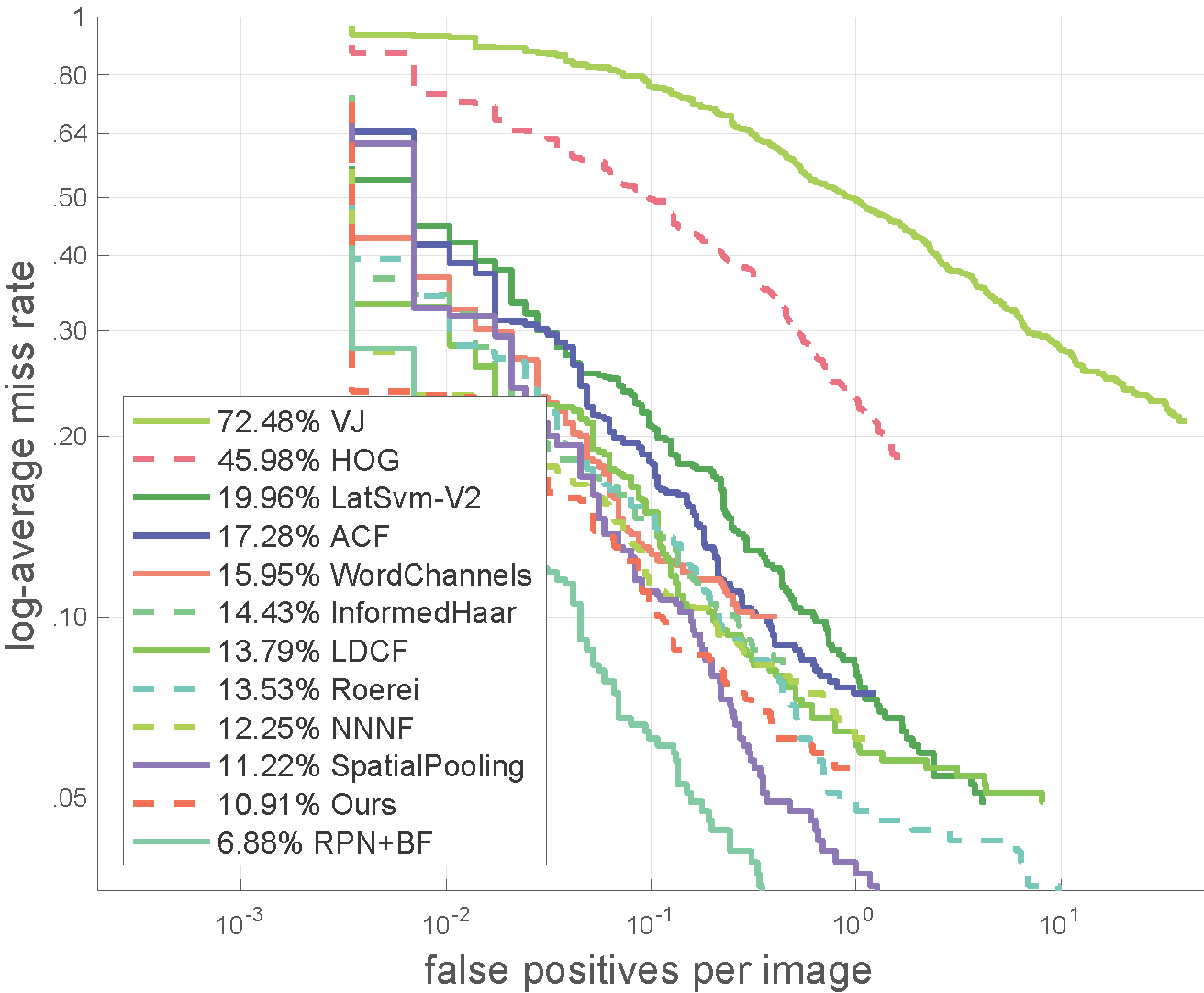
Experiments on Caltech (left) and INRIA (right) datasets shown below. The proposed method is denoted as "Ours". Our proposed approach runs 88X faster than the best performing method from the widely-known Filtered Channel Feature framework.
Publication:
Ego-Motion Estimation
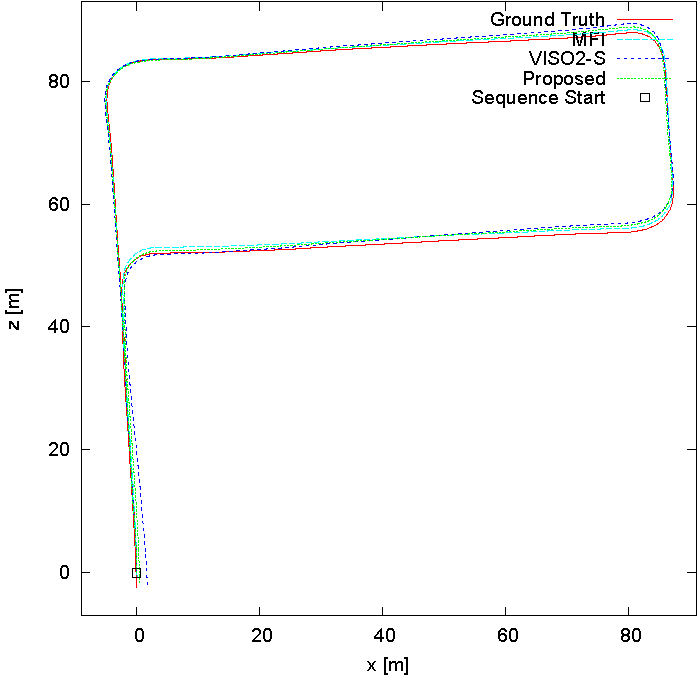
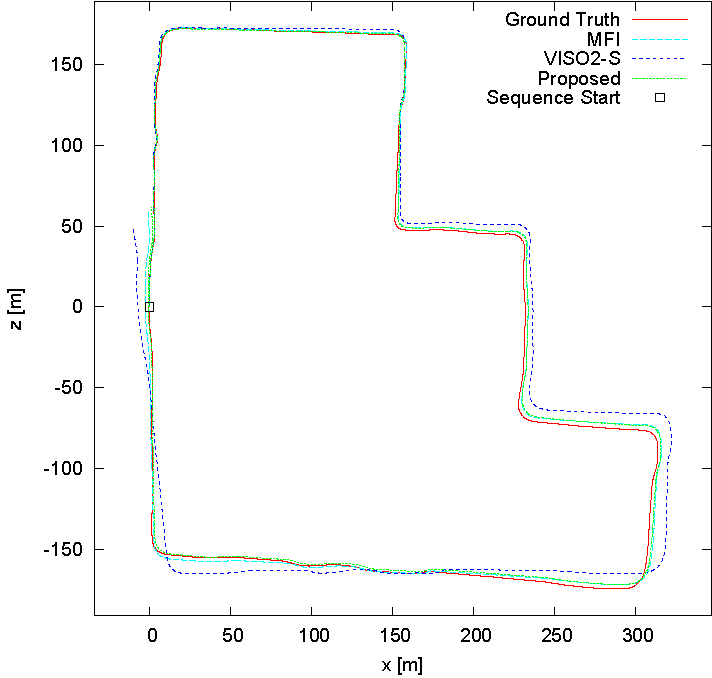
A Framework for Fast and Robust Visual Odometry
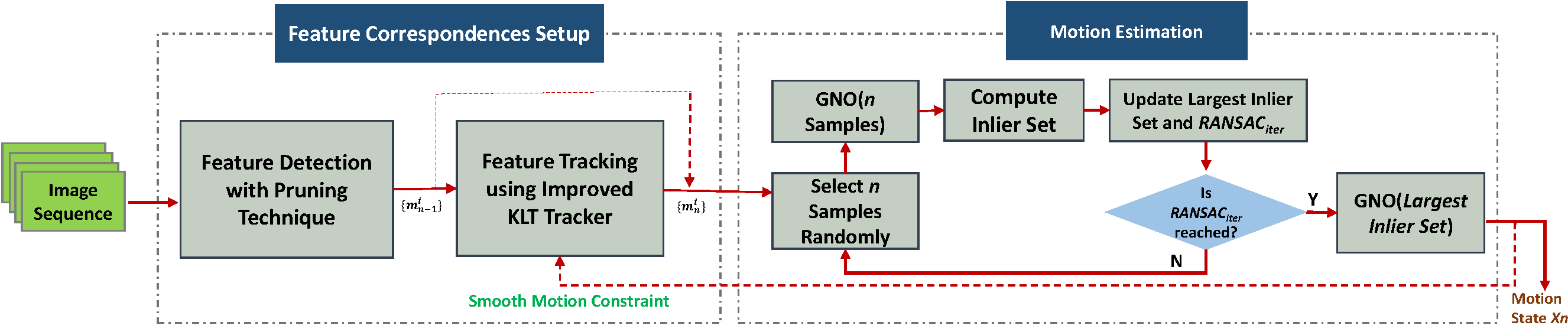
We propose a framework for ego-motion estimation that integrates runtime-efficient strategies with robust techniques at various core stages in visual odometry is proposed. Firstly, a pruning method is employed to reduce the computational complexity of KLT feature detection without compromising on the quality of the features. Next, three strategies, i.e. smooth motion constraint, adaptive integration window technique and automatic tracking failure detection scheme, are introduced into the conventional KLT tracker to facilitate generation of feature correspondences in a robust and runtime efficient way. Finally, an early RANSAC termination condition is integrated with the Gaussian-Newton optimization scheme to enable rapid convergence of the motion estimation process while achieving robustness.
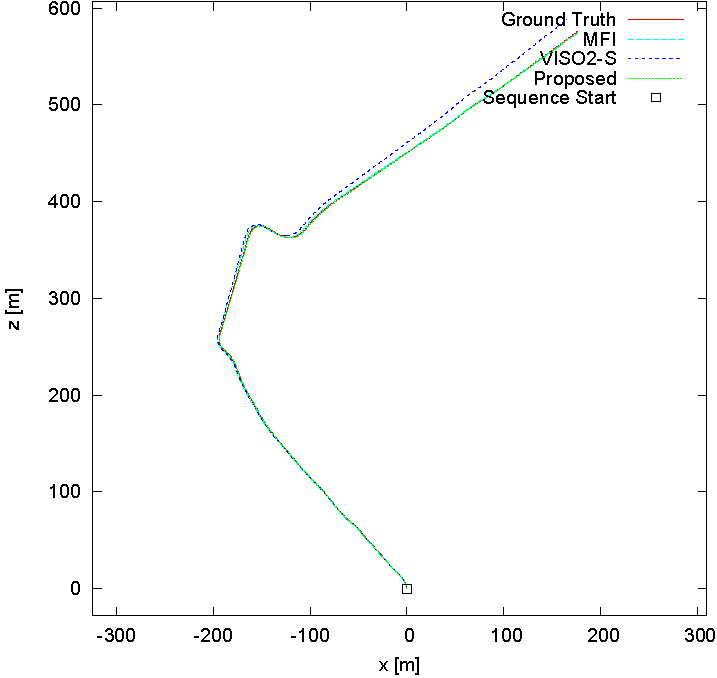
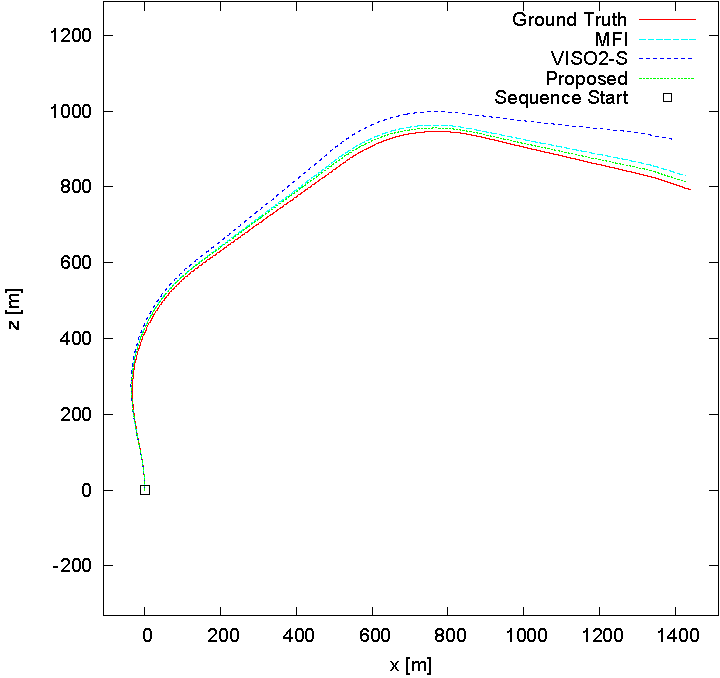
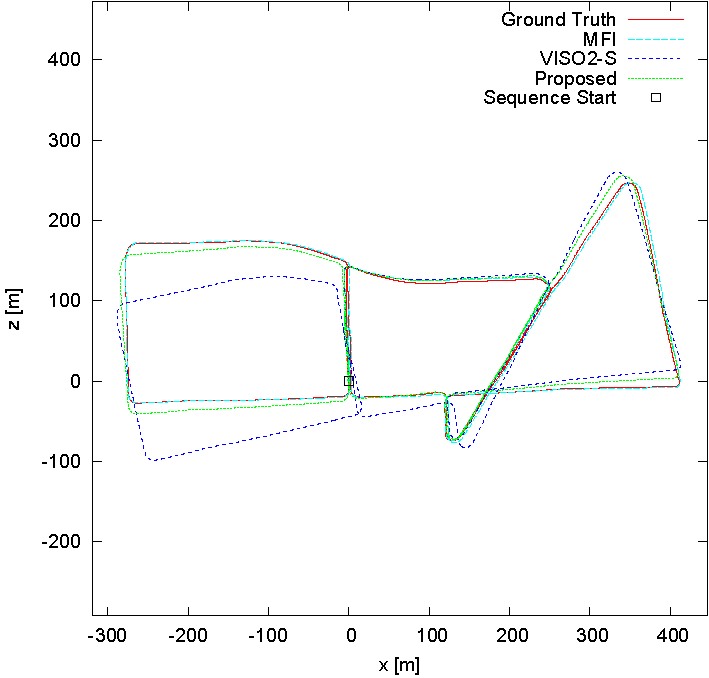
Experiments were carried out based on the KITTI odometry dataset. Some samples of the dataset are shown below.

Results show that the proposed technique outperforms existing visual odometry methods by producing more accurate ego-motion estimation in notably lesser amount of time.
Publication:
Road Surface Detection
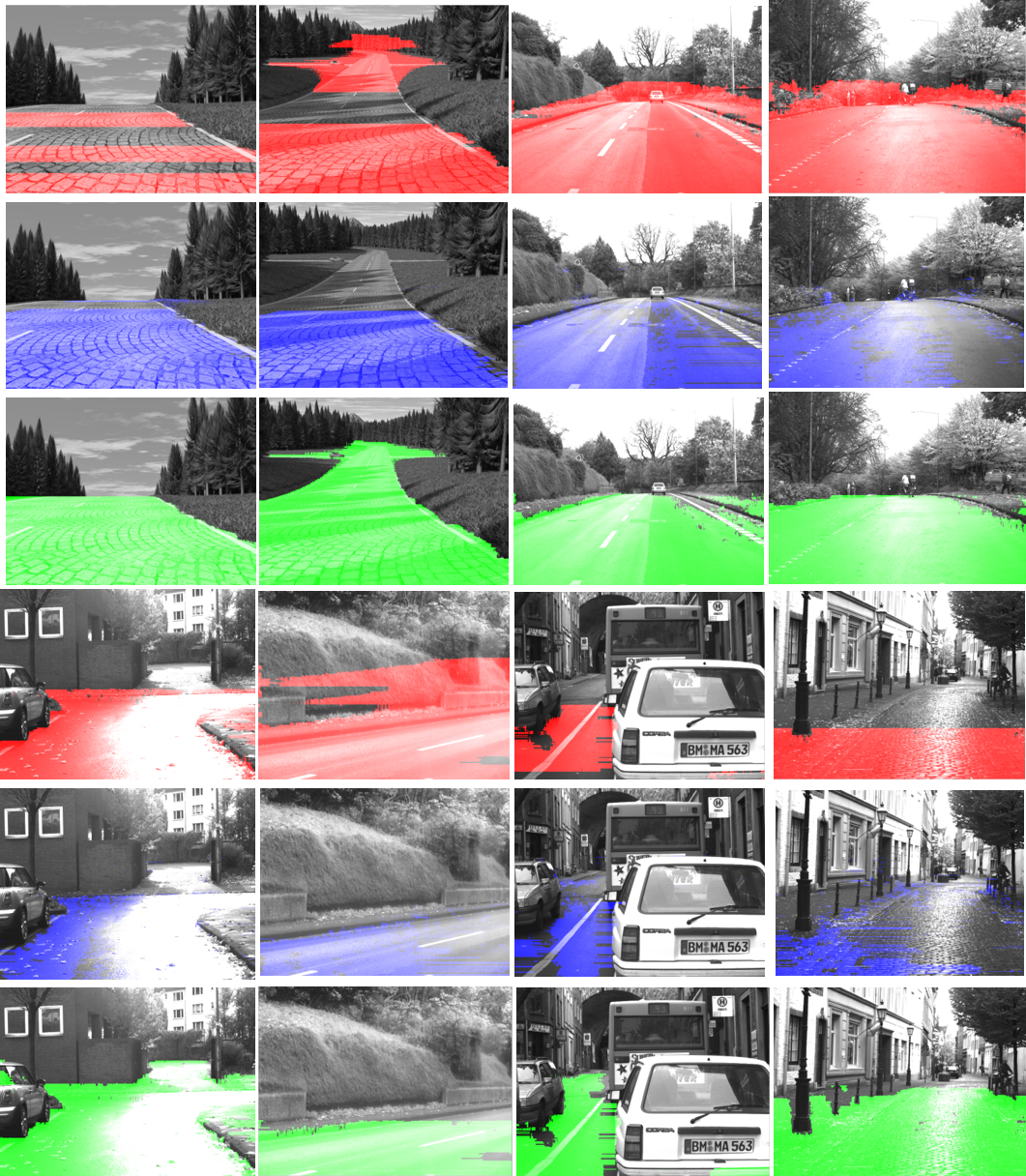
Non-Parametric Technique Based High-Speed Road Detection
Existing road detection methods attempt to fit the road surface into rigid models (e.g. planar, clothoid or B-Spline), thereby restricting to road surfaces that match specific models. In addition, the curve fitting strategies employed in such techniques incur high-computational complexity making them unsuitable for in-vehicle deployments. We propose an efficient non-parametric road detection algorithm that exploits the depth cue. The propose method relies on four intrinsic road scene attributes observed under stereo geometry and has been shown to reliably detect both planar and non-planar roads efficiently. Extensive evaluations are performed on three widely used benchmarks (i.e. enpeda, KITTI and Daimler) encompassing many complex road scenarios. The experimental results show that the proposed algorithm significantly outperforms the well-known techniques both in terms of detection accuracy and runtime performance. The figure below compares the proposed algorithm (green) with two baseline algorithms (red and blue) for enpeda and Daimler datasets.
Publication: