
XSAT Power Supply Subsystem
| Architecture | Direct Energy Transfer (DET) |
| Solar Array Size | 342 cells in 19 series 18 parallel configuration |
| Max. Solar Cell Efficiency, η | ~27 % |
| Solar Cell Type | Triple Junction GaAs |
| Peak Power Output | Between ~380W@-50°C and ~260W@+110°C |
| Battery Capacity | 13.5Ah (340Wh) |
| Battery Voltage | Nominal 25.2V, Maximum 29.4V |
| Main Bus Voltage | 16.0V to 30.5V |
| BCR Efficiency | > 90% |
| MBR Effiiciency | > 85% |
Table 1: Key parameters of the PSS
Power control module (PCM)
The function of the PCM is to regulate power transfer between the solar array, battery and the subsystems of the satellite. The PCM consists of a battery charge regulator (BCR), which is a step-down converter and main bus regulator (MBR) together with telemetry acquisition and main bus protection electronics.
PSS architecture
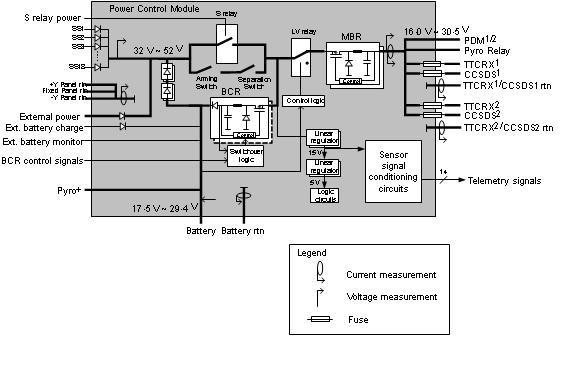

Power Control Module
As shown above, there are sensors at various points to acquire key telemetry data during the orbit, e.g. voltages, currents and temperatures of solar panel and batteries. Protection circuit includes the low-voltage (LV) protection relays and fuses. In the event of current overload of the fused lines, the fuse wil blow to protect the main bus. The LV relay separates the other subsystems from the PCM to protect the battery from over-discharge in case the voltage level falls below a critical level. Redundancies in the critical components are also included to prevent single point failure in the subsystem. Control logic circuitries are required to activate cold redundant BCR as well as to isolate faulty hot redundant MBR.
Power Distribution Module (PDM)
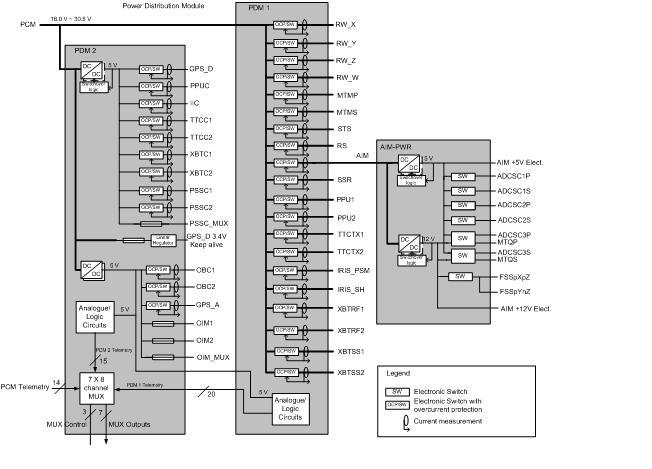
PDM Implementation Block Diagram
PDM1
PDM2
Each switchable cum over-current protected line contains a FET-switch, a current sensor and an over-current detection circuit. Each FET-switch is controlled by an OIM switch command as well as the over-current detection circuit. On/off status is fed back to OIM. The current sensor monitors the current level, feed back this current level to the over-current detection circuit. Once the current level exceeds a pre-set value, the over-current detection circuit will turn off the switcher.