In advanced augmented reality the trend is to make use of useful feature on the subject for tracking purposes. Feature-based tracking tracks 2D and 3D surfaces. Normally in this approach the 2D or 3D models of objects or scenes need to be created beforehand – this is a time-consuming process.
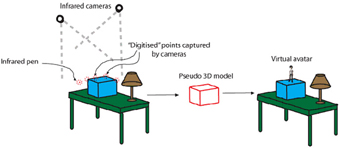
We develop an “On-the-Fly” approach which allows developers to create models “on-the-fly” easily and quickly. It basically uses a pointing device which we call the 3D digitizer. It has an infra-red LED at the tip.
Overall setup and idea
Two Wii Remote cameras are mounted on the wall/ceiling. The cameras are able to track the 3D digitizer. Another viewing camera is attached to user’s head-mounted display. The user uses the 3D digitizer to point at surfaces of the object of interest, in order to map out the useful features on the object. The Wii Remotes can track the 3D digitizer at very high rate. The 3D position of the digitizer can be found by triangulation. After this, the tracking algorithm kicks in and tracks these natural features.