
This project explores the feasibility of a user centric delivery of point-of-purchase information using biometric data capture, intelligent analysis of facial data, height, weight, body type, age, gender and other forms of data that can be directly captured in a non-invasive manner. Such a system must have an inherent intelligence that is ambient, and ubiquitous – allowing for interpretation of a wide variety of stimuli and that can be easily collected. The systems intelligences must have offer a range of options that can be autonomously responsive and give meaningful responses to the visual and sensor cues.
Such a system prefigures an information delivery for advertising, social communication and even for forms emergency communications that may be needed in a public or social environment.
The aim of this research is to study the feasibility of a system which is able to deliver user-aware and user-centric point-of-purchase information. The system must have an inherent intelligence that is ambient and ubiquitous. It must be able to give autonomous and meaningful responses to visual and sensor cues. This system will be able to capture information such as facial data, height, weight, gender, race, location, gaze, product label etc. In runtime mode the system Intelligently analyses such data to provide better solution for advertising and social communication
Gender, Age and Biometric Recognition
Our approach uses sensing with computer vision for facial detection/recognition, product label detection, sensing with hardware sensors for location detection of shoppers using inexpensive ultrasonic sensors and the display of augmented/annotated virtual production information on product label


Mixed Reality Annotation
Another aspect of this work is in the creation of a Real-Time Product Label Detection using Feature Detection and Tracking on the Graphics Processing Unit. This system provides shoppers with production information at their fingertips. Consumer’s product preferences of are profiled and relevant product recommendation can be made. The system provides virtual price tag/information and product branding and promotion. We use a Using feature detection and extraction method to identify each product based on the packaging and labelling. The feature detection and matching is done on GPU for high performance and speed. The algorithm is a Scale Invariant Feature Transform (SIFT) that provides good ability to detect and assign feature points that are extracted from the input images. We match feature points from camera image with the feature points of input images of the product packaging and labeling to detect and find the input image with the most matches.



Positioning and Localisation
Another major component of this systems research is location and positioning - the location tracking of consumers in a retail environment. Knowing where the shopper is can be advantageous as relevant advertising information can be delivered to her accordingly. For example, if the consumer spends a lot of time in front of a particular shelf, information of selected products will be delivered to them.
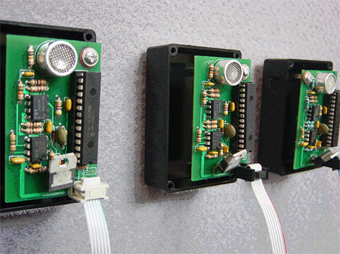
Accuracy can be improved by installing more receivers for wider coverage in a cell arrangement and by continued work in improving the algorithms (firmware and high level) and signal processing
